Changing Setpoints#
This notebook shows an example of changing the generator setpoints in a time-domain simulation. Data in this example is trivial, but the example can be retrofitted for scenarios such as economic dispatch incorporation or reinforcement learning.
Steps are the folllwing:
Initialize a system by running the power flow,
Set the first simulation stop time in
TDS.config.tf,Run the simulation,
Update the setpoints,
Set the new simulation stop time and repeat from 3 until the end.
Step 1: Case Setup#
import andes
from andes.utils import get_case
kundur = get_case('kundur/kundur_full.xlsx')
ss = andes.run(kundur)
Working directory: "/home/hacui/repos/andes/examples"
> Loaded config from file "/home/hacui/.andes/andes.rc"
> Loaded generated Python code in "/home/hacui/.andes/pycode".
Parsing input file "/home/hacui/repos/andes/andes/cases/kundur/kundur_full.xlsx"...
Input file parsed in 0.2635 seconds.
System internal structure set up in 0.0315 seconds.
-> System connectivity check results:
No islanded bus detected.
System is interconnected.
Each island has a slack bus correctly defined and enabled.
-> Power flow calculation
Numba: Off
Sparse solver: KLU
Solution method: NR method
Power flow initialized in 0.0087 seconds.
0: |F(x)| = 14.9282832
1: |F(x)| = 3.608627841
2: |F(x)| = 0.1701107882
3: |F(x)| = 0.002038626956
4: |F(x)| = 3.745104027e-07
Converged in 5 iterations in 0.0108 seconds.
Initialization for dynamics completed in 0.0395 seconds.
Initialization was successful.
Report saved to "kundur_full_out.txt" in 0.0023 seconds.
-> Single process finished in 0.5215 seconds.
# disable the Toggle in this case
ss.Toggle.alter('u', 1, 0)
Step 2: Set the First Stop Time#
# simulate to t=1 sec
# specify the first stop in `ss.TDS.config.tf`
ss.TDS.config.tf = 1
Step 3: Run Simulation#
ss.TDS.run()
-> Time Domain Simulation Summary:
Sparse Solver: KLU
Simulation time: 0.0-1 s.
Fixed step size: h=33.33 ms. Shrink if not converged.
Simulation completed in 0.0245 seconds.
Outputs to "kundur_full_out.lst" and "kundur_full_out.npz".
Outputs written in 0.0039 seconds.
True
Step 4. Apply the auxiliary power setpoints to TGOV1.paux0.v#
First, let's check the equations of TGOV1. ss.TGOV1.paux0 is associated with equation 0 = paux - paux0, in which paux is added to the power input equation.
print(ss.TGOV1.doc())
Model <TGOV1> in Group <TurbineGov>
TGOV1 turbine governor model.
Implements the PSS/E TGOV1 model without deadband.
Parameters
Name | Description | Default | Unit | Properties
-------+-----------------------------------+---------+------+-----------------
idx | unique device idx | | |
u | connection status | 1 | bool |
name | device name | | |
syn | Synchronous generator idx | | | mandatory,unique
Tn | Turbine power rating. Equal to | | MVA |
| `Sn` if not provided. | | |
wref0 | Base speed reference | 1 | p.u. |
R | Speed regulation gain (mach. base | 0.050 | p.u. | ipower
| default) | | |
VMAX | Maximum valve position | 1.200 | p.u. | power
VMIN | Minimum valve position | 0 | p.u. | power
T1 | Valve time constant | 0.100 | |
T2 | Lead-lag lead time constant | 0.200 | |
T3 | Lead-lag lag time constant | 10 | |
Dt | Turbine damping coefficient | 0 | | power
Sg | Rated power from generator | 0 | MVA |
ug | Generator connection status | 0 | bool |
Vn | Rated voltage from generator | 0 | kV |
Variables
Name | Type | Description | Unit | Properties
-------+----------+--------------------------------------+------+-----------
LAG_y | State | State in lag TF | | v_str
LL_x | State | State in lead-lag | | v_str
omega | ExtState | Generator speed | p.u. |
paux | Algeb | Auxiliary power input | | v_str
pout | Algeb | Turbine final output power | | v_str
wref | Algeb | Speed reference variable | | v_str
pref | Algeb | Reference power input | | v_str
wd | Algeb | Generator speed deviation | p.u. | v_str
pd | Algeb | Pref plus speed deviation times gain | p.u. | v_str
LL_y | Algeb | Output of lead-lag | | v_str
tm | ExtAlgeb | Mechanical power interface to SynGen | |
Initialization Equations
Name | Type | Initial Value
-------+----------+--------------
LAG_y | State | pd * 1 / 1
LL_x | State | LAG_y
omega | ExtState |
paux | Algeb | paux0
pout | Algeb | ue * tm0
wref | Algeb | wref0
pref | Algeb | tm0 * R
wd | Algeb | 0
pd | Algeb | ue * tm0
LL_y | Algeb | LAG_y
tm | ExtAlgeb |
Differential Equations
Name | Type | RHS of Equation "T x' = f(x, y)" | T (LHS)
-------+----------+----------------------------------+--------
LAG_y | State | 1 * pd - 1 * LAG_y | T1
LL_x | State | (LAG_y - LL_x) | T3
omega | ExtState | |
Algebraic Equations
Name | Type | RHS of Equation "0 = g(x, y)"
------+----------+------------------------------------------------------------
paux | Algeb | paux0 - paux
pout | Algeb | ue * (LL_y - Dt * wd) - pout
wref | Algeb | wref0 - wref
pref | Algeb | pref0 * R - pref
wd | Algeb | ue * (omega - wref) - wd
pd | Algeb | ue*(- wd + pref + paux) * gain - pd
LL_y | Algeb | 1 * T2 * (LAG_y - LL_x) + 1 * LL_x * T3 - LL_y * T3+
| | LL_LT1_z1 * LL_LT2_z1 * (LL_y - 1 * LL_x)
tm | ExtAlgeb | ue * (pout - tm0)
Services
Name | Equation | Type
-------+----------+-------------
ue | u * ug | ConstService
pref0 | tm0 | ConstService
paux0 | 0 | ConstService
gain | ue/R | ConstService
Discretes
Name | Type | Info
---------+------------+---------------
LAG_lim | AntiWindup | Limiter in Lag
LL_LT1 | LessThan |
LL_LT2 | LessThan |
Blocks
Name | Type | Info
-----+---------------+-----
LAG | LagAntiWindup |
LL | LeadLag |
Config Fields in [TGOV1]
Option | Value | Info | Acceptable values
--------------+-------+------------------------------------+------------------
allow_adjust | 1 | allow adjusting upper or lower | (0, 1)
| | limits |
adjust_lower | 0 | adjust lower limit | (0, 1)
adjust_upper | 1 | adjust upper limit | (0, 1)
ss.TGOV1.paux0.v
array([0., 0., 0., 0.])
# look up the original values of TGOV1 make sure they are as expected
ss.TGOV1.paux0.v
array([0., 0., 0., 0.])
# MUST use in-place assignments.
# Here, we increase the setpoint of the 0-th generator
# method 1: use in-place assignment again
ss.TGOV1.paux0.v[0] = 0.05
# method 2: use ``ss.TGOV1.alter()``
# ss.TGOV1.alter('paux0', 1, 0.05)
ss.TGOV1.paux0.v
array([0.05, 0. , 0. , 0. ])
Continue to simulate to 2 seconds.
ss.TDS.config.tf = 2
ss.TDS.run()
Simulation completed in 0.0916 seconds.
Outputs to "kundur_full_out.lst" and "kundur_full_out.npz".
Outputs written in 0.0032 seconds.
True
ss.TDS.plotter.plot(ss.TGOV1.paux)
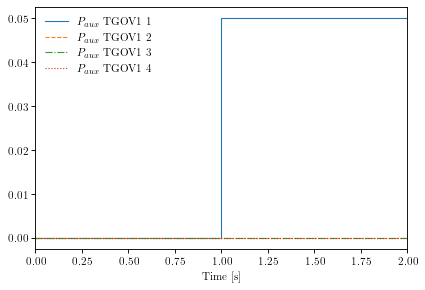
(<Figure size 480x320 with 1 Axes>, <AxesSubplot:xlabel='Time [s]'>)
ss.TDS.plotter.plot(ss.TGOV1.pout)
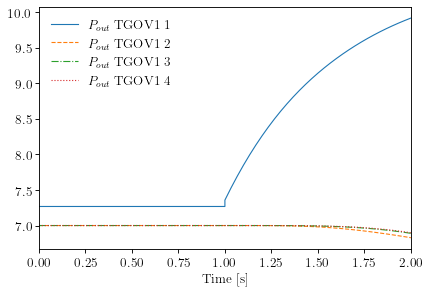
(<Figure size 480x320 with 1 Axes>, <AxesSubplot:xlabel='Time [s]'>)
ss.TDS.plotter.plot(ss.GENROU.omega)
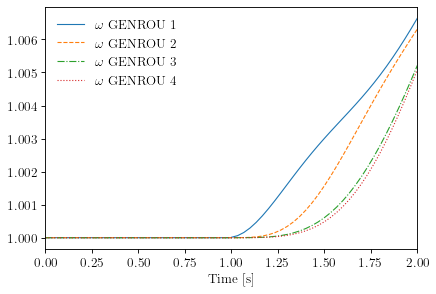
(<Figure size 480x320 with 1 Axes>, <AxesSubplot:xlabel='Time [s]'>)
Step 5: Set Another New Setpoints and New Ending TIme.#
In this example, we clear the auxiliary power previously set to TGOV1.paux0.v
# method 1: use in-place assignment again
ss.TGOV1.paux0.v[0] = 0.
# method 2: use ``ss.TGOV1.alter()``
# ss.TGOV1.alter('paux0', 1, 0)
# set the new ending time to 10 sec.
ss.TDS.config.tf = 10
ss.TDS.run()
Simulation completed in 0.6068 seconds.
Outputs to "kundur_full_out.lst" and "kundur_full_out.npz".
Outputs written in 0.0275 seconds.
True
ss.TDS.plotter.plot(ss.TGOV1.paux)
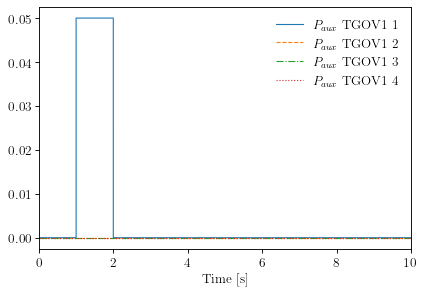
(<Figure size 480x320 with 1 Axes>, <AxesSubplot:xlabel='Time [s]'>)
ss.TDS.plotter.plot(ss.GENROU.omega)
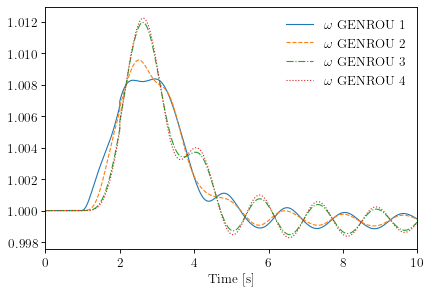
(<Figure size 480x320 with 1 Axes>, <AxesSubplot:xlabel='Time [s]'>)
!andes misc -C
"/home/hacui/repos/andes/examples/kundur_full_out.npz" removed.
"/home/hacui/repos/andes/examples/kundur_full_out.txt" removed.
"/home/hacui/repos/andes/examples/kundur_full_out.lst" removed.