Using CLI from Notebook#
This example notebook is a supplement to the ANDES tutorial. Make sure you have read the tutorial on using the CLI first.
A brief version can be found at https://github.com/cuihantao/andes/blob/master/README.md#run-simulations
The ! magic in iPython#
This example shows how to use the ANDES CLI from Jupyter Notebook.
It is based on the iPython magic !.
To run a command from within IPython or Jupyter, place a ! immediately before the command.
Conversely, all commands demonstrated in this notebook can be used in a terminal/shell by removing the preceeding ! sign.
Set up on Windows#
Windows users will need to install MSYS2 to support most of the Linux shell commands.
To install MSYS2-base, uncomment the following line and run it:
# !conda install -c msys2 -n base --yes m2-base
Running Shell Commands#
For example, to list the directory , use !ls. This is equivalent to executing ls from the terminal.
!ls
demonstration ex1.ipynb ex3.ipynb ex5.ipynb ex7.ipynb ex9.ipynb
ex10.ipynb ex2.ipynb ex4.ipynb ex6.ipynb ex8.ipynb verification
Likewise, to run andes, use !andes. Addition arguments can be passed as usual.
!andes
_ _ | Version 1.6.4.post10.dev0+gd1a4589d
/_\ _ _ __| |___ ___ | Python 3.9.10 on Linux, 04/19/2022 08:30:40 PM
/ _ \| ' \/ _` / -_|_-< |
/_/ \_\_||_\__,_\___/__/ | This program comes with ABSOLUTELY NO WARRANTY.
usage: andes [-h] [-v {1,10,20,30,40}]
{run,plot,doc,misc,prepare,prep,selftest,st,demo} ...
positional arguments:
{run,plot,doc,misc,prepare,prep,selftest,st,demo}
[run] run simulation routine; [plot] plot results;
[doc] quick documentation; [misc] misc. functions;
[prepare] prepare the numerical code; [selftest] run
self test;
optional arguments:
-h, --help show this help message and exit
-v {1,10,20,30,40}, --verbose {1,10,20,30,40}
Verbosity level in 10-DEBUG, 20-INFO, 30-WARNING, or
40-ERROR.
Run a simulation#
Pass the path to the case file and other arguments to andes from the command line as follows.
!andes run ../andes/cases/kundur/kundur_full.xlsx -r tds
_ _ | Version 1.6.4.post10.dev0+gd1a4589d
/_\ _ _ __| |___ ___ | Python 3.9.10 on Linux, 04/19/2022 08:30:41 PM
/ _ \| ' \/ _` / -_|_-< |
/_/ \_\_||_\__,_\___/__/ | This program comes with ABSOLUTELY NO WARRANTY.
Working directory: "/home/hacui/repos/andes/examples"
> Loaded config from file "/home/hacui/.andes/andes.rc"
> Loaded generated Python code in "/home/hacui/.andes/pycode".
Parsing input file "../andes/cases/kundur/kundur_full.xlsx"...
Input file parsed in 0.2502 seconds.
System internal structure set up in 0.0306 seconds.
-> System connectivity check results:
No islanded bus detected.
System is interconnected.
Each island has a slack bus correctly defined and enabled.
-> Power flow calculation
Numba: Off
Sparse solver: KLU
Solution method: NR method
Power flow initialized in 0.0029 seconds.
0: |F(x)| = 14.9282832
1: |F(x)| = 3.608627841
2: |F(x)| = 0.1701107882
3: |F(x)| = 0.002038626956
4: |F(x)| = 3.745104027e-07
Converged in 5 iterations in 0.0032 seconds.
Initialization for dynamics completed in 0.0278 seconds.
Initialization was successful.
Report saved to "kundur_full_out.txt" in 0.0016 seconds.
-> Time Domain Simulation Summary:
Sparse Solver: KLU
Simulation time: 0.0-20.0 s.
Fixed step size: h=33.33 ms. Shrink if not converged.
<Toggle 1>: Line.Line_8 status changed to 0 at t=2.0 sec.
100%|########################################| 100.0/100 [00:01<00:00, 86.61%/s]
Simulation completed in 1.1546 seconds.
Outputs to "kundur_full_out.lst" and "kundur_full_out.npz".
Outputs written in 0.0235 seconds.
-> Single process finished in 1.6411 seconds.
Case file names can be separated from the path, which can be passed to -p. The above command is equivanent to
!andes run kundur_full.xlsx -p "../andes/cases/kundur/" -r tds
_ _ | Version 1.6.4.post10.dev0+gd1a4589d
/_\ _ _ __| |___ ___ | Python 3.9.10 on Linux, 04/19/2022 08:30:43 PM
/ _ \| ' \/ _` / -_|_-< |
/_/ \_\_||_\__,_\___/__/ | This program comes with ABSOLUTELY NO WARRANTY.
Working directory: "/home/hacui/repos/andes/examples"
> Loaded config from file "/home/hacui/.andes/andes.rc"
> Loaded generated Python code in "/home/hacui/.andes/pycode".
Parsing input file "../andes/cases/kundur/kundur_full.xlsx"...
Input file parsed in 0.2501 seconds.
System internal structure set up in 0.0305 seconds.
-> System connectivity check results:
No islanded bus detected.
System is interconnected.
Each island has a slack bus correctly defined and enabled.
-> Power flow calculation
Numba: Off
Sparse solver: KLU
Solution method: NR method
Power flow initialized in 0.0029 seconds.
0: |F(x)| = 14.9282832
1: |F(x)| = 3.608627841
2: |F(x)| = 0.1701107882
3: |F(x)| = 0.002038626956
4: |F(x)| = 3.745104027e-07
Converged in 5 iterations in 0.0032 seconds.
Initialization for dynamics completed in 0.0277 seconds.
Initialization was successful.
Report saved to "kundur_full_out.txt" in 0.0016 seconds.
-> Time Domain Simulation Summary:
Sparse Solver: KLU
Simulation time: 0.0-20.0 s.
Fixed step size: h=33.33 ms. Shrink if not converged.
<Toggle 1>: Line.Line_8 status changed to 0 at t=2.0 sec.
100%|########################################| 100.0/100 [00:01<00:00, 86.32%/s]
Simulation completed in 1.1584 seconds.
Outputs to "kundur_full_out.lst" and "kundur_full_out.npz".
Outputs written in 0.0237 seconds.
-> Single process finished in 1.6446 seconds.
!pwd
/home/hacui/repos/andes/examples
import os
os.path.isfile('../andes/cases/kundur/kundur_full.xlsx')
True
PSS/E RAW and DYR Files#
To run a simulation using PSS/E raw and dyr files, pass the dyr file to argument --addfile.
For example:
!andes run ../andes/cases/kundur/kundur.raw --addfile ../andes/cases/kundur/kundur_full.dyr -r tds
_ _ | Version 1.6.4.post10.dev0+gd1a4589d
/_\ _ _ __| |___ ___ | Python 3.9.10 on Linux, 04/19/2022 08:30:46 PM
/ _ \| ' \/ _` / -_|_-< |
/_/ \_\_||_\__,_\___/__/ | This program comes with ABSOLUTELY NO WARRANTY.
Working directory: "/home/hacui/repos/andes/examples"
> Loaded config from file "/home/hacui/.andes/andes.rc"
> Loaded generated Python code in "/home/hacui/.andes/pycode".
Parsing input file "../andes/cases/kundur/kundur.raw"...
MODIFIED KUNDUR'S TWO-AREA TEST SYSTEM, DISTRIBUTED WITH ANDES
SEE THE BOOK "POWER SYSTEM STABILITY AND CONTROL" FOR ORIGINAL DATA
Input file parsed in 0.0024 seconds.
Parsing additional file "../andes/cases/kundur/kundur_full.dyr"...
Addfile parsed in 0.2239 seconds.
System internal structure set up in 0.0297 seconds.
-> System connectivity check results:
No islanded bus detected.
System is interconnected.
Each island has a slack bus correctly defined and enabled.
-> Power flow calculation
Numba: Off
Sparse solver: KLU
Solution method: NR method
Power flow initialized in 0.0028 seconds.
0: |F(x)| = 3.175850023
1: |F(x)| = 3.176155228e-08
Converged in 2 iterations in 0.0014 seconds.
Initialization for dynamics completed in 0.0276 seconds.
Initialization was successful.
Report saved to "kundur_out.txt" in 0.0014 seconds.
-> Time Domain Simulation Summary:
Sparse Solver: KLU
Simulation time: 0.0-20.0 s.
Fixed step size: h=33.33 ms. Shrink if not converged.
<Toggle Toggle_1>: Line.Line_8 status changed to 0 at t=2.0 sec.
100%|########################################| 100.0/100 [00:01<00:00, 86.44%/s]
Simulation completed in 1.1569 seconds.
Outputs to "kundur_out.lst" and "kundur_out.npz".
Outputs written in 0.0235 seconds.
-> Single process finished in 1.6165 seconds.
Check the output lst file#
!cat kundur_full_out.lst
0, Time [s], Time [s]
1, delta GENROU 1, $\delta$ GENROU 1
2, delta GENROU 2, $\delta$ GENROU 2
3, delta GENROU 3, $\delta$ GENROU 3
4, delta GENROU 4, $\delta$ GENROU 4
5, omega GENROU 1, $\omega$ GENROU 1
6, omega GENROU 2, $\omega$ GENROU 2
7, omega GENROU 3, $\omega$ GENROU 3
8, omega GENROU 4, $\omega$ GENROU 4
9, e1q GENROU 1, $e'_q$ GENROU 1
10, e1q GENROU 2, $e'_q$ GENROU 2
11, e1q GENROU 3, $e'_q$ GENROU 3
12, e1q GENROU 4, $e'_q$ GENROU 4
13, e1d GENROU 1, $e'_d$ GENROU 1
14, e1d GENROU 2, $e'_d$ GENROU 2
15, e1d GENROU 3, $e'_d$ GENROU 3
16, e1d GENROU 4, $e'_d$ GENROU 4
17, e2d GENROU 1, $e''_d$ GENROU 1
18, e2d GENROU 2, $e''_d$ GENROU 2
19, e2d GENROU 3, $e''_d$ GENROU 3
20, e2d GENROU 4, $e''_d$ GENROU 4
21, e2q GENROU 1, $e''_q$ GENROU 1
22, e2q GENROU 2, $e''_q$ GENROU 2
23, e2q GENROU 3, $e''_q$ GENROU 3
24, e2q GENROU 4, $e''_q$ GENROU 4
25, LAG_y TGOV1 1, $y_{LAG}$ TGOV1 1
26, LAG_y TGOV1 2, $y_{LAG}$ TGOV1 2
27, LAG_y TGOV1 3, $y_{LAG}$ TGOV1 3
28, LAG_y TGOV1 4, $y_{LAG}$ TGOV1 4
29, LL_x TGOV1 1, $x'_{LL}$ TGOV1 1
30, LL_x TGOV1 2, $x'_{LL}$ TGOV1 2
31, LL_x TGOV1 3, $x'_{LL}$ TGOV1 3
32, LL_x TGOV1 4, $x'_{LL}$ TGOV1 4
33, vp EXDC2 1, $V_p$ EXDC2 1
34, vp EXDC2 2, $V_p$ EXDC2 2
35, vp EXDC2 3, $V_p$ EXDC2 3
36, vp EXDC2 4, $V_p$ EXDC2 4
37, LS_y EXDC2 1, $y_{LS}$ EXDC2 1
38, LS_y EXDC2 2, $y_{LS}$ EXDC2 2
39, LS_y EXDC2 3, $y_{LS}$ EXDC2 3
40, LS_y EXDC2 4, $y_{LS}$ EXDC2 4
41, LL_x EXDC2 1, $x'_{LL}$ EXDC2 1
42, LL_x EXDC2 2, $x'_{LL}$ EXDC2 2
43, LL_x EXDC2 3, $x'_{LL}$ EXDC2 3
44, LL_x EXDC2 4, $x'_{LL}$ EXDC2 4
45, LA_y EXDC2 1, $y_{LA}$ EXDC2 1
46, LA_y EXDC2 2, $y_{LA}$ EXDC2 2
47, LA_y EXDC2 3, $y_{LA}$ EXDC2 3
48, LA_y EXDC2 4, $y_{LA}$ EXDC2 4
49, W_x EXDC2 1, $x'_{W}$ EXDC2 1
50, W_x EXDC2 2, $x'_{W}$ EXDC2 2
51, W_x EXDC2 3, $x'_{W}$ EXDC2 3
52, W_x EXDC2 4, $x'_{W}$ EXDC2 4
53, a Bus 1, $\theta$ Bus 1
54, a Bus 2, $\theta$ Bus 2
55, a Bus 3, $\theta$ Bus 3
56, a Bus 4, $\theta$ Bus 4
57, a Bus 5, $\theta$ Bus 5
58, a Bus 6, $\theta$ Bus 6
59, a Bus 7, $\theta$ Bus 7
60, a Bus 8, $\theta$ Bus 8
61, a Bus 9, $\theta$ Bus 9
62, a Bus 10, $\theta$ Bus 10
63, v Bus 1, $V$ Bus 1
64, v Bus 2, $V$ Bus 2
65, v Bus 3, $V$ Bus 3
66, v Bus 4, $V$ Bus 4
67, v Bus 5, $V$ Bus 5
68, v Bus 6, $V$ Bus 6
69, v Bus 7, $V$ Bus 7
70, v Bus 8, $V$ Bus 8
71, v Bus 9, $V$ Bus 9
72, v Bus 10, $V$ Bus 10
73, q PV 2, $q$ PV 2
74, q PV 3, $q$ PV 3
75, q PV 4, $q$ PV 4
76, q Slack 1, $q$ Slack 1
77, p Slack 1, $p$ Slack 1
78, Id GENROU 1, $I_d$ GENROU 1
79, Id GENROU 2, $I_d$ GENROU 2
80, Id GENROU 3, $I_d$ GENROU 3
81, Id GENROU 4, $I_d$ GENROU 4
82, Iq GENROU 1, $I_q$ GENROU 1
83, Iq GENROU 2, $I_q$ GENROU 2
84, Iq GENROU 3, $I_q$ GENROU 3
85, Iq GENROU 4, $I_q$ GENROU 4
86, vd GENROU 1, $V_d$ GENROU 1
87, vd GENROU 2, $V_d$ GENROU 2
88, vd GENROU 3, $V_d$ GENROU 3
89, vd GENROU 4, $V_d$ GENROU 4
90, vq GENROU 1, $V_q$ GENROU 1
91, vq GENROU 2, $V_q$ GENROU 2
92, vq GENROU 3, $V_q$ GENROU 3
93, vq GENROU 4, $V_q$ GENROU 4
94, tm GENROU 1, $\tau_m$ GENROU 1
95, tm GENROU 2, $\tau_m$ GENROU 2
96, tm GENROU 3, $\tau_m$ GENROU 3
97, tm GENROU 4, $\tau_m$ GENROU 4
98, te GENROU 1, $\tau_e$ GENROU 1
99, te GENROU 2, $\tau_e$ GENROU 2
100, te GENROU 3, $\tau_e$ GENROU 3
101, te GENROU 4, $\tau_e$ GENROU 4
102, vf GENROU 1, $v_f$ GENROU 1
103, vf GENROU 2, $v_f$ GENROU 2
104, vf GENROU 3, $v_f$ GENROU 3
105, vf GENROU 4, $v_f$ GENROU 4
106, XadIfd GENROU 1, $X_{ad}I_{fd}$ GENROU 1
107, XadIfd GENROU 2, $X_{ad}I_{fd}$ GENROU 2
108, XadIfd GENROU 3, $X_{ad}I_{fd}$ GENROU 3
109, XadIfd GENROU 4, $X_{ad}I_{fd}$ GENROU 4
110, Pe GENROU 1, $P_e$ GENROU 1
111, Pe GENROU 2, $P_e$ GENROU 2
112, Pe GENROU 3, $P_e$ GENROU 3
113, Pe GENROU 4, $P_e$ GENROU 4
114, Qe GENROU 1, $Q_e$ GENROU 1
115, Qe GENROU 2, $Q_e$ GENROU 2
116, Qe GENROU 3, $Q_e$ GENROU 3
117, Qe GENROU 4, $Q_e$ GENROU 4
118, psid GENROU 1, $\psi_d$ GENROU 1
119, psid GENROU 2, $\psi_d$ GENROU 2
120, psid GENROU 3, $\psi_d$ GENROU 3
121, psid GENROU 4, $\psi_d$ GENROU 4
122, psiq GENROU 1, $\psi_q$ GENROU 1
123, psiq GENROU 2, $\psi_q$ GENROU 2
124, psiq GENROU 3, $\psi_q$ GENROU 3
125, psiq GENROU 4, $\psi_q$ GENROU 4
126, psi2q GENROU 1, $\psi_{aq}$ GENROU 1
127, psi2q GENROU 2, $\psi_{aq}$ GENROU 2
128, psi2q GENROU 3, $\psi_{aq}$ GENROU 3
129, psi2q GENROU 4, $\psi_{aq}$ GENROU 4
130, psi2d GENROU 1, $\psi_{ad}$ GENROU 1
131, psi2d GENROU 2, $\psi_{ad}$ GENROU 2
132, psi2d GENROU 3, $\psi_{ad}$ GENROU 3
133, psi2d GENROU 4, $\psi_{ad}$ GENROU 4
134, psi2 GENROU 1, $\psi_a$ GENROU 1
135, psi2 GENROU 2, $\psi_a$ GENROU 2
136, psi2 GENROU 3, $\psi_a$ GENROU 3
137, psi2 GENROU 4, $\psi_a$ GENROU 4
138, Se GENROU 1, $S_e(|\psi_{a}|)$ GENROU 1
139, Se GENROU 2, $S_e(|\psi_{a}|)$ GENROU 2
140, Se GENROU 3, $S_e(|\psi_{a}|)$ GENROU 3
141, Se GENROU 4, $S_e(|\psi_{a}|)$ GENROU 4
142, XaqI1q GENROU 1, $X_{aq}I_{1q}$ GENROU 1
143, XaqI1q GENROU 2, $X_{aq}I_{1q}$ GENROU 2
144, XaqI1q GENROU 3, $X_{aq}I_{1q}$ GENROU 3
145, XaqI1q GENROU 4, $X_{aq}I_{1q}$ GENROU 4
146, paux TGOV1 1, $P_{aux}$ TGOV1 1
147, paux TGOV1 2, $P_{aux}$ TGOV1 2
148, paux TGOV1 3, $P_{aux}$ TGOV1 3
149, paux TGOV1 4, $P_{aux}$ TGOV1 4
150, pout TGOV1 1, $P_{out}$ TGOV1 1
151, pout TGOV1 2, $P_{out}$ TGOV1 2
152, pout TGOV1 3, $P_{out}$ TGOV1 3
153, pout TGOV1 4, $P_{out}$ TGOV1 4
154, wref TGOV1 1, $\omega_{ref}$ TGOV1 1
155, wref TGOV1 2, $\omega_{ref}$ TGOV1 2
156, wref TGOV1 3, $\omega_{ref}$ TGOV1 3
157, wref TGOV1 4, $\omega_{ref}$ TGOV1 4
158, pref TGOV1 1, $P_{ref}$ TGOV1 1
159, pref TGOV1 2, $P_{ref}$ TGOV1 2
160, pref TGOV1 3, $P_{ref}$ TGOV1 3
161, pref TGOV1 4, $P_{ref}$ TGOV1 4
162, wd TGOV1 1, $\omega_{dev}$ TGOV1 1
163, wd TGOV1 2, $\omega_{dev}$ TGOV1 2
164, wd TGOV1 3, $\omega_{dev}$ TGOV1 3
165, wd TGOV1 4, $\omega_{dev}$ TGOV1 4
166, pd TGOV1 1, $P_d$ TGOV1 1
167, pd TGOV1 2, $P_d$ TGOV1 2
168, pd TGOV1 3, $P_d$ TGOV1 3
169, pd TGOV1 4, $P_d$ TGOV1 4
170, LL_y TGOV1 1, $y_{LL}$ TGOV1 1
171, LL_y TGOV1 2, $y_{LL}$ TGOV1 2
172, LL_y TGOV1 3, $y_{LL}$ TGOV1 3
173, LL_y TGOV1 4, $y_{LL}$ TGOV1 4
174, v EXDC2 1, $E_{term}$ EXDC2 1
175, v EXDC2 2, $E_{term}$ EXDC2 2
176, v EXDC2 3, $E_{term}$ EXDC2 3
177, v EXDC2 4, $E_{term}$ EXDC2 4
178, vout EXDC2 1, $v_{out}$ EXDC2 1
179, vout EXDC2 2, $v_{out}$ EXDC2 2
180, vout EXDC2 3, $v_{out}$ EXDC2 3
181, vout EXDC2 4, $v_{out}$ EXDC2 4
182, vref EXDC2 1, $V_{ref}$ EXDC2 1
183, vref EXDC2 2, $V_{ref}$ EXDC2 2
184, vref EXDC2 3, $V_{ref}$ EXDC2 3
185, vref EXDC2 4, $V_{ref}$ EXDC2 4
186, Se EXDC2 1, $S_e(|V_{out}|)$ EXDC2 1
187, Se EXDC2 2, $S_e(|V_{out}|)$ EXDC2 2
188, Se EXDC2 3, $S_e(|V_{out}|)$ EXDC2 3
189, Se EXDC2 4, $S_e(|V_{out}|)$ EXDC2 4
190, vi EXDC2 1, $V_i$ EXDC2 1
191, vi EXDC2 2, $V_i$ EXDC2 2
192, vi EXDC2 3, $V_i$ EXDC2 3
193, vi EXDC2 4, $V_i$ EXDC2 4
194, LL_y EXDC2 1, $y_{LL}$ EXDC2 1
195, LL_y EXDC2 2, $y_{LL}$ EXDC2 2
196, LL_y EXDC2 3, $y_{LL}$ EXDC2 3
197, LL_y EXDC2 4, $y_{LL}$ EXDC2 4
198, W_y EXDC2 1, $y_{W}$ EXDC2 1
199, W_y EXDC2 2, $y_{W}$ EXDC2 2
200, W_y EXDC2 3, $y_{W}$ EXDC2 3
201, W_y EXDC2 4, $y_{W}$ EXDC2 4
Plot and save to file#
We found a limitation of using andes plot from within Notebook/iPython. The figure won't be displayed correctly. The workaround is to save the image as a file and display it from the notebook.
Please let us know if you have better solutions.
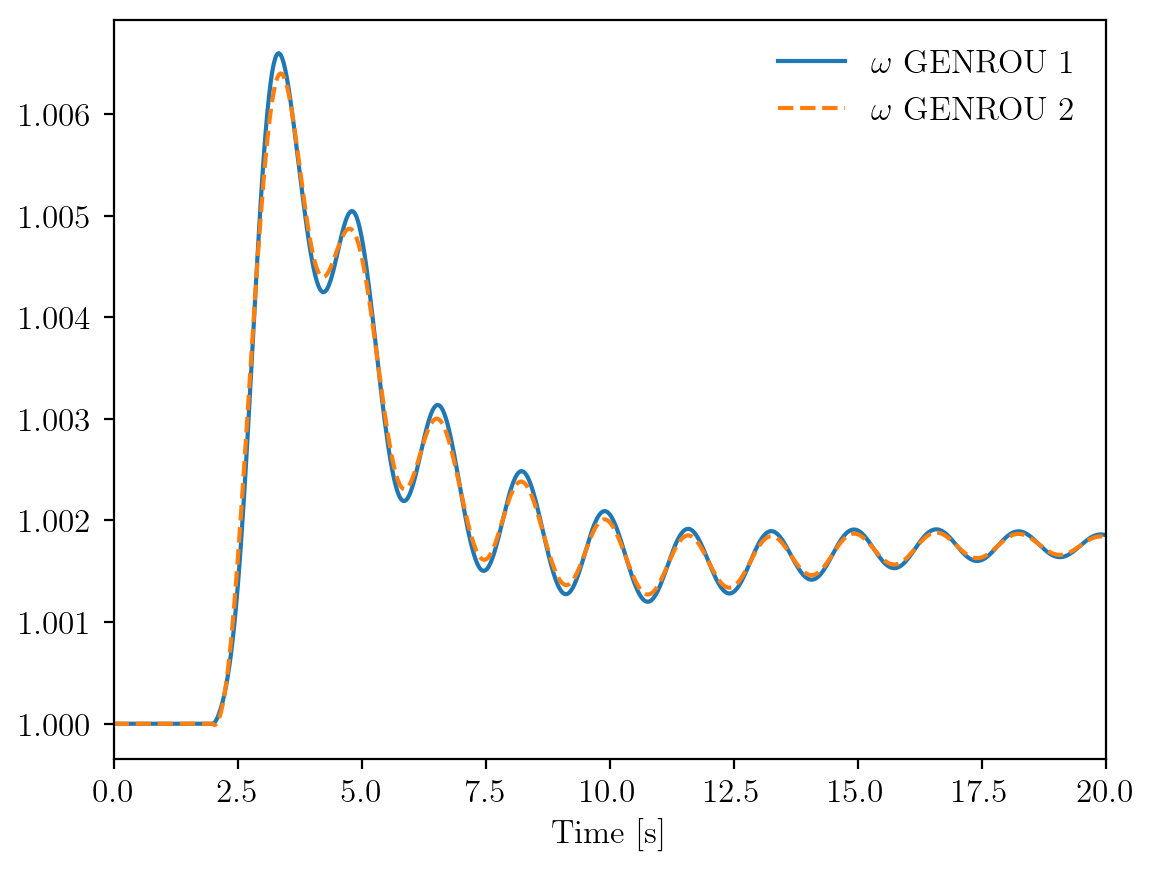
!andes plot kundur_full_out.lst 0 5 6 --save
Figure saved to "kundur_full_out_1.png".
Figure(640x480)
Display image#
from IPython.display import Image
Image("kundur_full_out_1.png")
Using xargs for index lookup#
A convenient tool in Linux/macOS is xargs, which turns the standard output of one program into arguments for another.
andes plot --xargs accepts an input of search pattern for variable names and returns a list of arguments, including the matched indices, that can be understood by andes plot.
To illustrate, let's look at an example output of andes plot --xargs.
!andes plot kundur_full_out.lst --xargs "omega GENROU"
kundur_full_out.lst 0 5 6 7 8
The output consists of the lst file name, the default x-axis index 0, and the indices for the found variables. The full output can be passed to andes plot without modification.
We use the following command to pass the arguments:
!andes plot kundur_full_out.lst --xargs "omega GENROU" | xargs andes plot
Figure(640x480)
where | is the pipe operator in shell for piping the standard output of the left-hand side to the right-hand side, xargs captures the pipe-in and appends it to andes plot.
The command is equivalent to manually running
!andes plot kundur_full_out.lst 5 6 7 8
Figure(640x480)
Cleanup#
Remove the saved png image files.
!rm -v *.png
removed 'kundur_full_out_1.png'
!andes misc -C
"/home/hacui/repos/andes/examples/kundur_full_out.npz" removed.
"/home/hacui/repos/andes/examples/kundur_full_out.txt" removed.
"/home/hacui/repos/andes/examples/kundur_out.lst" removed.
"/home/hacui/repos/andes/examples/kundur_out.npz" removed.
"/home/hacui/repos/andes/examples/kundur_full_out.lst" removed.
"/home/hacui/repos/andes/examples/kundur_out.txt" removed.