Post-Fault Rotor Oscillation on an SMIB System#
When a synchronous generator connected to an infinite bus experiences a transient fault, the rotor swings away from its equilibrium angle and then oscillates as the synchronizing torque pulls it back. The amplitude and persistence of these oscillations depend on the machine inertia, network strength, and the damping provided by flux dynamics and controllers.
This notebook constructs a single-machine infinite-bus (SMIB) system from scratch using the ANDES v2 API, applies a three-phase fault, and visualizes the resulting electromechanical oscillation. The system is intentionally configured with zero mechanical damping (\(D = 0\)) to produce a slowly-decaying swing that motivates the need for supplementary damping control — a task well suited to reinforcement learning, explored in a companion notebook.
Build the SMIB System#
The system has two buses connected by a single transmission line:
Bus |
Role |
Model |
|---|---|---|
1 |
Generator bus |
GENROU (6th-order salient-pole machine) |
2 |
Infinite bus |
GENCLS with very large inertia (\(M = 6 \times 10^7\)) |
The generator is equipped with a TGOV1 governor and an EXST1 exciter. Mechanical damping is set to \(D = 0\) so that all damping comes from the electromagnetic flux dynamics inherent in the GENROU model.
ss = andes.System(default_config=True)
ss.undill()
# --- network ---
ss.add("Bus", idx=1, name="Gen Bus", Vn=20.0, v0=1.05)
ss.add("Bus", idx=2, name="Inf Bus", Vn=20.0, v0=1.0)
ss.add("Line", idx=1, bus1=1, bus2=2, Vn1=20.0, Vn2=20.0,
r=0.003, x=0.25, b=0.0)
# --- static generators (PFlow placeholders) ---
ss.add("PV", idx=1, bus=1, Vn=20.0, p0=0.9, q0=0.0, v0=1.05)
ss.add("Slack", idx=2, bus=2, Vn=20.0, v0=1.0)
# --- infinite bus: very large GENCLS ---
ss.add("GENCLS", idx="INF", bus=2, gen=2, Sn=1e9, Vn=20.0,
M=6e7, D=2e7, xd1=1e-9)
# --- finite machine: GENROU, D=0 ---
ss.add("GENROU", idx="GEN1", bus=1, gen=1, Sn=100, Vn=20.0,
M=6.0, D=0.0,
xd=1.8, xd1=0.3, xd2=0.25, Td10=8.0, Td20=0.03,
xq=1.7, xq1=0.55, xq2=0.25, Tq10=0.4, Tq20=0.05,
ra=0.003, xl=0.2)
# --- governor ---
ss.add("TGOV1", idx="TG1", syn="GEN1",
T1=0.5, T2=2.0, T3=7.0, VMAX=99)
# --- exciter ---
ss.add("EXST1", idx="EX1", syn="GEN1", TR=0.02, KA=50.0)
# --- three-phase fault: 6 cycles on the generator bus ---
ss.add("Fault", idx="Flt1", bus=1, tf=1.0, tc=1.1, xf=1e-4)
ss.setup()
print(f"System: {ss.Bus.n} buses, {ss.Line.n} line, "
f"{ss.GENROU.n} GENROU, {ss.GENCLS.n} GENCLS")
System: 2 buses, 1 line, 1 GENROU, 1 GENCLS
Power Flow#
Solve for the initial steady-state operating point.
ss.PFlow.run()
print(f"Bus voltages: {ss.Bus.v.v}")
print(f"Bus angles (deg): {np.rad2deg(ss.Bus.a.v)}")
print(f"Generator P = {ss.PV.p0.v[0]:.3f} pu on {ss.config.mva:.0f} MVA base")
Bus voltages: [1.05 1. ]
Bus angles (deg): [1.23240246e+01 5.59782271e-14]
Generator P = 0.900 pu on 100 MVA base
Apply a Three-Phase Fault and Run TDS#
A solid three-phase fault (\(X_f = 10^{-4}\) pu) is applied at the generator bus at \(t = 1.0\) s and cleared at \(t = 1.1\) s (6 cycles at 60 Hz). This drives the rotor angle far from equilibrium and excites the electromechanical oscillation mode.
ss.TDS.config.tf = 15.0
ss.TDS.run()
True
Rotor Speed Response#
The generator rotor speed \(\omega\) deviates from nominal (1.0 pu) after the fault is cleared. With \(D = 0\), the only source of damping is the electromagnetic interaction between the rotor flux linkages and the stator currents — an effect captured by the GENROU sub-transient model but absent in the classical (GENCLS) model.
ts_omega = ss.TDS.get_timeseries(ss.GENROU.omega)
ts_delta = ss.TDS.get_timeseries(ss.GENROU.delta)
t = ts_omega.index.values
omega = ts_omega.values.flatten()
delta_deg = np.rad2deg(ts_delta.values.flatten())
freq_hz = omega * ss.config.freq # convert to Hz
delta_omega = omega - 1.0 # deviation from nominal
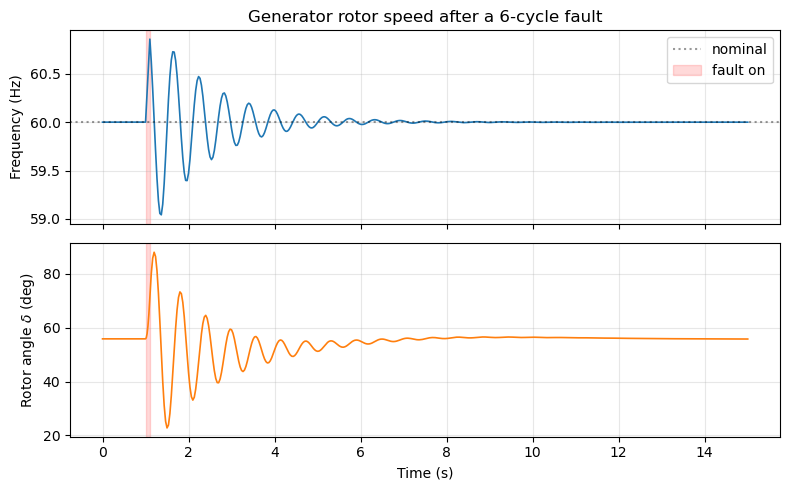
Quantify the Oscillation Decay#
We measure the peak-to-peak amplitude of the \(\omega\) deviation at successive swings. The ratio between consecutive peaks gives the per-cycle damping factor; the number of swings until the amplitude drops below a threshold quantifies the settling time.
Settling time (|Δω| < 0.001): 3.8 s after fault clearing
Peak-by-peak decay:
Swing Time (s) |Δω| (pu) Decay ratio
1 1.37 0.015958 —
2 2.23 0.007851 0.4920
3 3.10 0.004004 0.2509
4 4.00 0.002096 0.1314
5 4.87 0.000998 0.0625
6 5.73 0.000624 0.0391
7 6.93 0.000282 0.0177
8 8.10 0.000126 0.0079
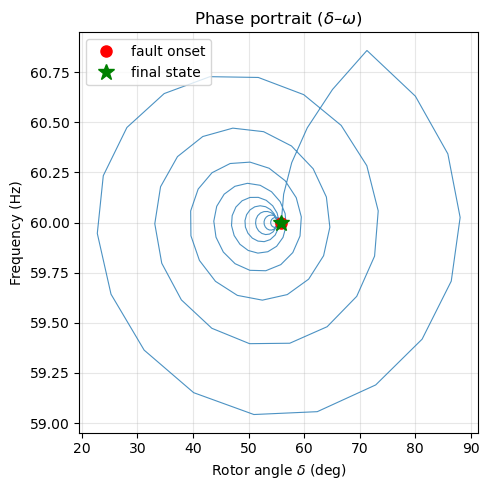
Phase Portrait#
The \((\delta, \omega)\) phase portrait reveals the trajectory of the rotor state. A damped oscillation spirals inward toward the equilibrium point; an undamped one would trace a closed orbit.
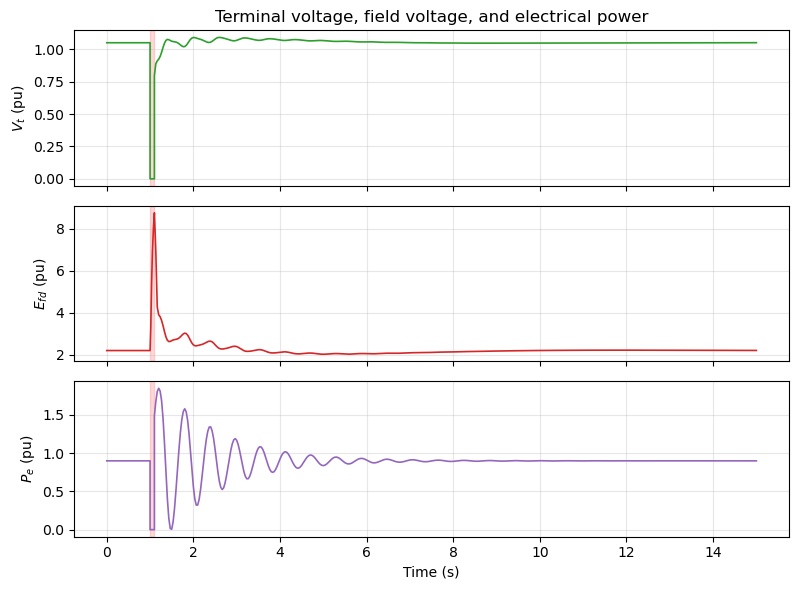
Terminal Voltage and Exciter Response#
The exciter (EXST1) regulates the terminal voltage during and after the fault. Its action also contributes a small component of electrical damping torque.
ts_vt = ss.TDS.get_timeseries(ss.GENROU.v) # terminal voltage
ts_vf = ss.TDS.get_timeseries(ss.GENROU.vf) # field voltage (exciter output)
ts_pe = ss.TDS.get_timeseries(ss.GENROU.Pe) # electrical power
Toward Supplementary Damping Control#
The 6-cycle fault on this SMIB system excites a ~1.1 Hz electromechanical oscillation mode. With \(D = 0\) (no explicit mechanical damping), the oscillation takes roughly 4 seconds to settle below 0.1% speed deviation, damped only by the GENROU flux dynamics and the exciter.
In larger interconnected systems, inter-area oscillation modes can be far less damped — and in some operating conditions, negatively damped (growing oscillations). This motivates supplementary damping controllers.
Below we use reinforcement learning to train a controller that injects auxiliary mechanical power \(p_\text{aux}\) through the governor to damp the oscillation faster, learning the optimal policy purely from simulation.
RL Environment Setup#
ANDES provides AndesEnv, a Gymnasium-compatible
environment that wraps the time-domain simulator. Key design choices:
Element |
Choice |
Rationale |
|---|---|---|
Observation |
\((\omega,\; \delta)\) |
Speed and angle give the agent full swing-equation state |
Action |
\(p_\text{aux} \in [-0.1, 0.1]\) pu |
Auxiliary power injected via the governor |
Reward |
\(-(f_\text{dev}^2 + 0.1\, p_\text{aux}^2)\) |
Penalise frequency deviation (Hz) and control effort |
Step interval |
\(\Delta t = 0.1\) s |
~11 control actions per oscillation cycle |
Episode |
\(t = 1.2\) s to \(7.2\) s |
Start after fault clears, run 6 s of ring-down |
Each reset() uses TDS.reinit() (~1 ms) instead of reloading the case
from disk, enabling hundreds of episodes per minute.
def reward_fn(obs, action, env):
"""Penalise frequency deviation (in Hz) and control effort."""
freq_dev_hz = (obs[0] - 1.0) * 60.0
return -float(freq_dev_hz ** 2 + 0.1 * action[0] ** 2)
def disturbance_fn(env):
"""Fast-forward the simulation past the fault (cleared at t = 1.1 s)."""
env.ss.TDS.config.tf = 1.2
env.ss.TDS.run(no_summary=True)
env = AndesEnv(
case=CASE,
obs=[("GENROU", "omega"), ("GENROU", "delta")],
acts=[("SynGen", "paux", ["GEN1"])], # control only the finite machine
reward_fn=reward_fn,
dt=0.1,
tf=7.2,
disturbance_fn=disturbance_fn,
action_low=-0.1,
action_high=0.1,
)
print(f"Observation space: {env.observation_space}")
print(f"Action space: {env.action_space}")
print(f"Steps per episode: {int((7.2 - 1.2) / 0.1)}")
Observation space: Box(-inf, inf, (2,), float32)
Action space: Box(-0.1, 0.1, (1,), float32)
Steps per episode: 60
No-Control Baseline#
Run one episode with zero \(p_\text{aux}\) to record the uncontrolled trajectory for comparison.
FREQ_NOM = env.ss.config.freq
zero_action = np.zeros(env.action_space.shape, dtype=np.float32)
obs, _ = env.reset(seed=42)
bl_t = [float(env.ss.dae.t)]
bl_omega = [obs[0]]
bl_reward = 0.0
while True:
obs, r, term, trunc, info = env.step(zero_action)
bl_t.append(info["t"])
bl_omega.append(obs[0])
bl_reward += r
if term or trunc:
break
bl_t = np.array(bl_t)
bl_omega = np.array(bl_omega)
print(f"Baseline total reward: {bl_reward:.2f}")
print(f"Frequency range: [{bl_omega.min()*FREQ_NOM:.2f}, "
f"{bl_omega.max()*FREQ_NOM:.2f}] Hz")
Baseline total reward: -3.67
Frequency range: [59.16, 60.65] Hz
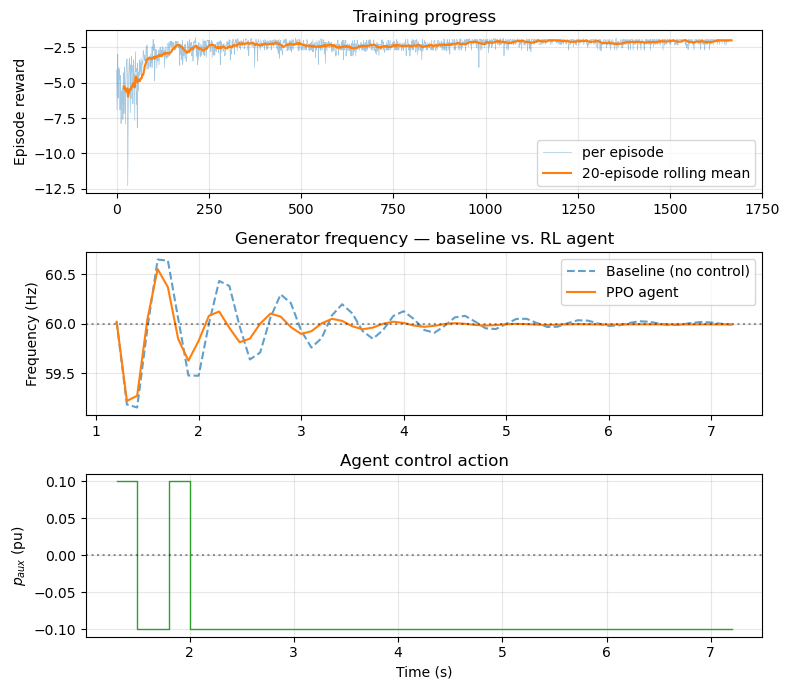
Train a PPO Agent#
We use Stable-Baselines3 PPO with a small MLP policy (two hidden layers of 64 units). Training for 100 000 time steps takes a few minutes on a single CPU core.
model = PPO("MlpPolicy", env, n_steps=256, verbose=0)
model.learn(total_timesteps=100_000, callback=callback)
print(f"Training complete — {len(callback.ep_rewards)} episodes")
Training complete — 1668 episodes
/home/hcui9/miniforge3/envs/a/lib/python3.12/site-packages/stable_baselines3/common/on_policy_algorithm.py:150: UserWarning: You are trying to run PPO on the GPU, but it is primarily intended to run on the CPU when not using a CNN policy (you are using ActorCriticPolicy which should be a MlpPolicy). See https://github.com/DLR-RM/stable-baselines3/issues/1245 for more info. You can pass `device='cpu'` or `export CUDA_VISIBLE_DEVICES=` to force using the CPU.Note: The model will train, but the GPU utilization will be poor and the training might take longer than on CPU.
warnings.warn(
Evaluate the Trained Agent#
Run one deterministic episode with the learned policy and record the trajectory alongside the baseline.
obs, _ = env.reset(seed=42)
ag_t = [float(env.ss.dae.t)]
ag_omega = [obs[0]]
ag_actions = []
ag_reward = 0.0
while True:
action, _ = model.predict(obs, deterministic=True)
obs, r, term, trunc, info = env.step(action)
ag_t.append(info["t"])
ag_omega.append(obs[0])
ag_actions.append(action[0])
ag_reward += r
if term or trunc:
break
ag_t = np.array(ag_t)
ag_omega = np.array(ag_omega)
ag_actions = np.array(ag_actions)
print(f"Agent total reward: {ag_reward:.2f}")
print(f"Baseline total reward: {bl_reward:.2f}")
print(f"Improvement: {ag_reward - bl_reward:+.2f} "
f"({(ag_reward - bl_reward) / abs(bl_reward) * 100:+.0f}%)")
Agent total reward: -1.95
Baseline total reward: -3.67
Improvement: +1.71 (+47%)
Results#
Extend This Example#
Increase training: 20 000 steps is a minimal run; 100 000+ steps with hyperparameter tuning will yield a stronger policy.
Richer observation: add terminal voltage \(V_t\) or electrical power \(P_e\) to give the agent more information about the system state.
Multi-machine systems: replace the SMIB with the IEEE 14-bus or 39-bus system to learn coordinated damping across multiple generators.
Compare with classical PSS: add an IEEEST stabiliser and overlay its response to see whether RL matches classical control design.