9. Contingency Analysis#
Contingency analysis is a critical component of power system planning and operations. It evaluates how the system responds to various disturbances, typically single component outages known as "N-1" contingencies. By systematically simulating line trips, generator outages, and bus faults, you can identify weak points in the system that might lead to voltage collapse or loss of synchronism.
This tutorial demonstrates how to perform systematic contingency screening using ANDES. We cover N-1 line contingencies, generator trips, fault-and-clear analysis, and methods for assessing stability from simulation results.
Note
Prerequisites: This tutorial uses Python functions and pandas DataFrames. Complete Time-Domain Simulation for disturbance basics and Parameter Sweeps and Batch Processing for batch simulation patterns before proceeding.
9.1. Setup#
%matplotlib inline
import andes
import numpy as np
import pandas as pd
from matplotlib import pyplot as plt
andes.config_logger(stream_level=30) # Reduce verbosity for batch runs
case_file = andes.get_case('kundur/kundur_full.xlsx')
9.2. N-1 Line Contingency Screening#
The most common contingency analysis involves testing the loss of each transmission line individually. For each line, we load a fresh system, add a Toggle device to trip the line at a specified time, run the simulation, and then assess whether the system remained stable.
First, let us identify all available lines in the test case.
# Load system to inspect lines
ss = andes.load(case_file, setup=False)
all_lines = list(ss.Line.idx.v)
print(f"Lines in the system: {all_lines}")
Lines in the system: ['Line_0', 'Line_1', 'Line_2', 'Line_3', 'Line_4', 'Line_5', 'Line_6', 'Line_7', 'Line_8', 'Line_9', 'Line_10', 'Line_11', 'Line_12', 'Line_13', 'Line_14']
Now we loop through each line and simulate its outage. For demonstration purposes, we test only the first three lines to keep execution time reasonable. In a real study, you would test all lines.
# Select subset for demonstration
lines_to_test = all_lines[:3]
results = {}
for line_idx in lines_to_test:
# Load fresh system with setup=False to allow adding devices
ss = andes.load(case_file, setup=False)
# Add line trip at t=1.0s
ss.add('Toggle', model='Line', dev=line_idx, t=1.0)
ss.setup()
# Disable existing Toggle in base case
ss.Toggle.set_status(1, 0)
ss.PFlow.run()
ss.TDS.config.tf = 5
ss.TDS.config.no_tqdm = 1
ss.TDS.run()
# Record max generator speed deviation as a stability metric
omega = ss.dae.ts.x[:, ss.GENROU.omega.a]
omega_max = omega.max()
omega_min = omega.min()
results[line_idx] = {
'omega_max': omega_max,
'omega_min': omega_min,
'exit_code': ss.exit_code,
'system': ss
}
print(f"{line_idx}: omega_max={omega_max:.4f}, omega_min={omega_min:.4f}")
Line_0: omega_max=1.0050, omega_min=0.9988
Line_1: omega_max=1.0050, omega_min=0.9988
Line_2: omega_max=1.0085, omega_min=0.9998
9.3. Stability Assessment#
After running simulations, we need to determine which contingencies resulted in stable operation and which caused problems. Common stability criteria include:
Generator speeds should remain within acceptable bounds (typically 0.95-1.05 pu)
Bus voltages should stay above minimum thresholds (typically 0.8 pu)
The simulation should complete without numerical failures
The following function encapsulates these checks.
Tip
The screening loop above and the function below use direct DAE array indexing (ss.dae.ts.x[:, addr]) for speed in batch loops. For interactive analysis or single simulations, ss.TDS.get_timeseries(ss.GENROU.omega) returns the same data as a pandas DataFrame — see Time-Domain Simulation for details.
def assess_stability(ss):
"""Return stability assessment for a completed simulation."""
if ss.exit_code != 0:
return {'stable': False, 'reason': 'simulation_failed'}
omega = ss.dae.ts.x[:, ss.GENROU.omega.a]
v = ss.dae.ts.y[:, ss.Bus.v.a]
omega_max = omega.max()
omega_min = omega.min()
v_min = v.min()
stable = (omega_max < 1.05 and omega_min > 0.95 and v_min > 0.8)
return {
'stable': stable,
'omega_max': omega_max,
'omega_min': omega_min,
'v_min': v_min
}
# Generate contingency report
records = []
for cont_id, data in results.items():
metrics = assess_stability(data['system'])
records.append({
'contingency': cont_id,
**metrics
})
df = pd.DataFrame(records)
df
| contingency | stable | omega_max | omega_min | v_min | |
|---|---|---|---|---|---|
| 0 | Line_0 | True | 1.005020 | 0.998823 | 0.880968 |
| 1 | Line_1 | True | 1.005018 | 0.998824 | 0.881003 |
| 2 | Line_2 | True | 1.008547 | 0.999849 | 0.830137 |
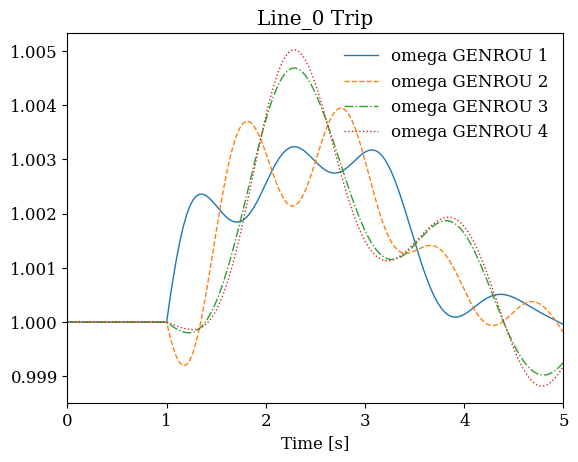
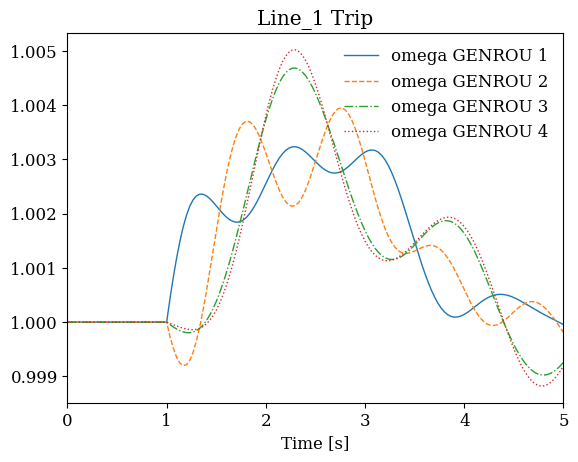
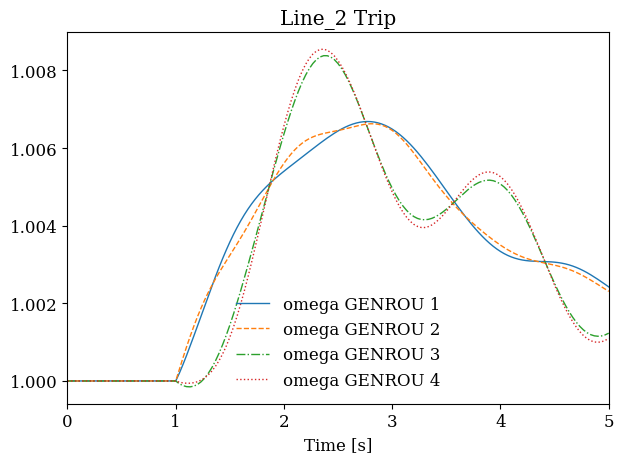
9.4. Visualizing Contingency Results#
Plotting the generator response for each contingency provides insight into the system dynamics and helps identify which modes are excited by different disturbances.
fig, axes = plt.subplots(1, len(results), figsize=(12, 4))
for ax, (line_idx, data) in zip(axes, results.items()):
ss = data['system']
ss.TDS.plt.plot(ss.GENROU.omega, ax=ax,
title=f'{line_idx} Trip', latex=False, show=False)
plt.tight_layout()
plt.show()
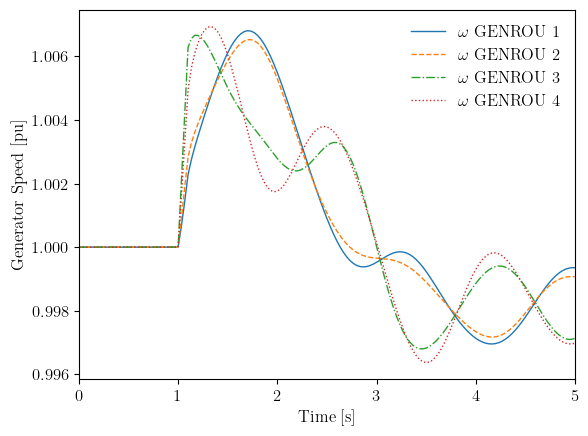
9.5. Fault-and-Clear Analysis#
Three-phase faults followed by fault clearing represent more severe disturbances than simple line trips. The severity depends on both the fault location (which bus) and the fault duration (clearing time). Faults near generators or at critical buses can cause rapid acceleration of nearby machines.
In ANDES, faults are modeled using the Fault device with tf (fault time) and tc (clearing time) parameters.
# Get bus indices for fault analysis
ss = andes.load(case_file, setup=False)
print(f"Available buses: {ss.Bus.idx.v}")
Available buses: [1, 2, 3, 4, 5, 6, 7, 8, 9, 10]
# Test 100ms fault at bus 3
ss = andes.load(case_file, setup=False)
# Add fault at t=1.0s, clear at t=1.1s (100ms duration)
ss.add('Fault', bus=3, tf=1.0, tc=1.1)
ss.setup()
# Disable existing Toggle in base case
ss.Toggle.set_status(1, 0)
ss.PFlow.run()
ss.TDS.config.tf = 5
ss.TDS.run()
True
# Plot response to fault
fig, ax = ss.TDS.plt.plot(ss.GENROU.omega, ylabel='Generator Speed [pu]')
9.6. Critical Clearing Time#
Critical Clearing Time (CCT) is the maximum fault duration for which the system remains stable. It is a key metric for protection system coordination. Finding CCT involves a binary search: if the system is stable at a given clearing time, we try a longer fault; if unstable, we try a shorter fault.
The following function implements this binary search.
def find_cct(case_file, bus_idx, t_fault=1.0,
tc_min=0.05, tc_max=0.5, tol=0.02):
"""Binary search for critical clearing time.
Parameters
----------
case_file : str
Path to the case file
bus_idx : int or str
Bus index for the fault
t_fault : float
Fault initiation time
tc_min : float
Minimum clearing time to test
tc_max : float
Maximum clearing time to test
tol : float
Tolerance for binary search (seconds)
Returns
-------
float
Estimated critical clearing time
"""
iterations = 0
max_iterations = 20 # Safety limit
while (tc_max - tc_min) > tol and iterations < max_iterations:
tc_mid = (tc_min + tc_max) / 2
ss = andes.load(case_file, setup=False)
ss.add('Fault', bus=bus_idx, tf=t_fault, tc=t_fault + tc_mid)
ss.setup()
# Disable existing Toggle
ss.Toggle.set_status(1, 0)
ss.PFlow.run()
ss.TDS.config.tf = 5
ss.TDS.config.no_tqdm = 1
ss.TDS.run()
metrics = assess_stability(ss)
if metrics['stable']:
tc_min = tc_mid # Stable, try longer fault
else:
tc_max = tc_mid # Unstable, try shorter fault
iterations += 1
return tc_min
# Find CCT for bus 3
cct = find_cct(case_file, bus_idx=3)
print(f"Critical Clearing Time for Bus 3: {cct*1000:.0f} ms")
Critical Clearing Time for Bus 3: 50 ms
9.7. Stability Metrics Summary#
The following table summarizes common metrics used in contingency screening:
Metric |
Description |
Typical Threshold |
|---|---|---|
|
Maximum generator speed |
< 1.05 pu |
|
Minimum generator speed |
> 0.95 pu |
|
Minimum bus voltage |
> 0.8 pu |
|
Simulation completion |
== 0 |
CCT |
Critical clearing time |
Depends on protection |
These thresholds should be adjusted based on the specific system and operating standards applicable to your study.
9.8. Cleanup#
!andes misc -C
"/home/docs/checkouts/readthedocs.org/user_builds/andes/checkouts/stable/docs/source/tutorials/kundur_full_out.txt" removed.
"/home/docs/checkouts/readthedocs.org/user_builds/andes/checkouts/stable/docs/source/tutorials/kundur_full_out.lst" removed.
"/home/docs/checkouts/readthedocs.org/user_builds/andes/checkouts/stable/docs/source/tutorials/kundur_full_out.npz" removed.
9.9. Next Steps#
Dynamic Control and Setpoint Changes - Runtime parameter modifications
Frequency Response and Load Shedding - Frequency response analysis
Parameter Sweeps and Batch Processing - Batch simulation techniques